Ottimizzazione topologica con riduzione di costi e tempi di produzione

Chi
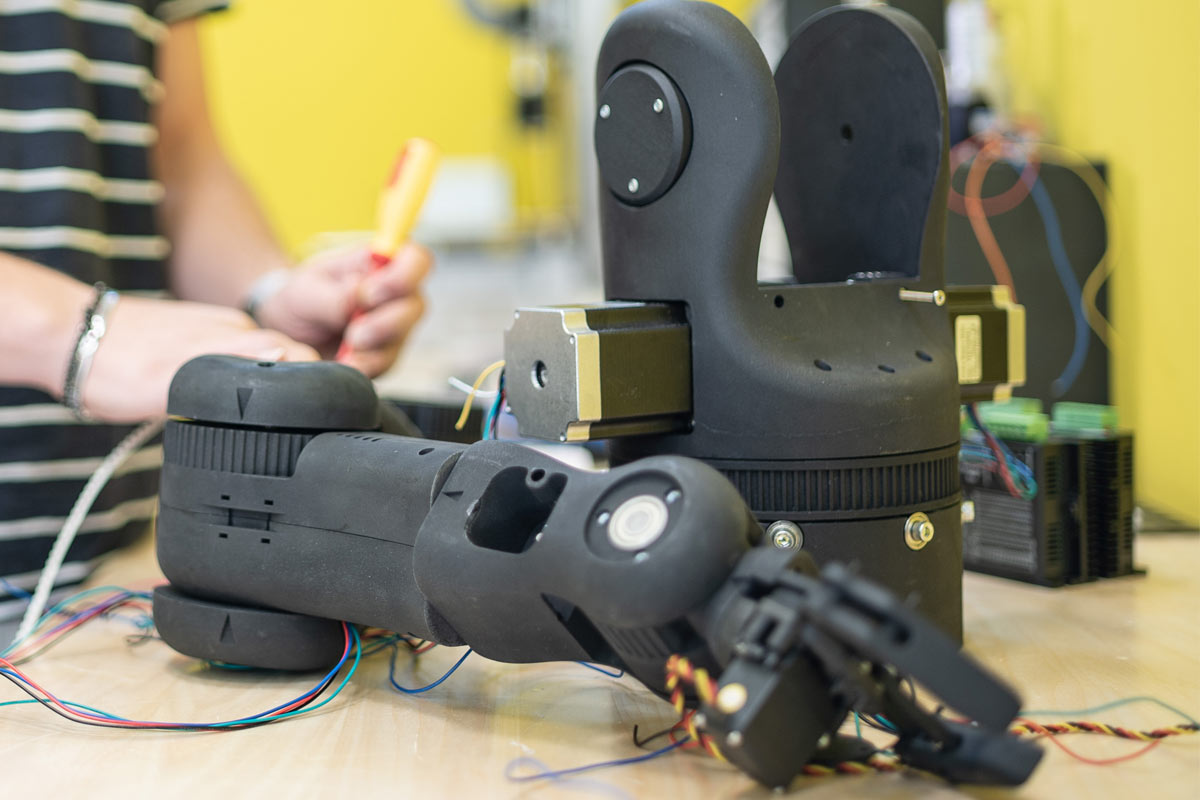
Il nostro reparto R&D ha deciso di testare la stampa e l’ottimizzazione topologica di un braccio robotico a 6 assi open source.
La sfida
Elmec 3D ha voluto provare in prima persona le infinite possibilità della tecnologia MJF applicate a un caso concreto, valutando le tolleranze dimensionali, la facilità di assemblaggio delle componenti stampate e la movimentazione meccanica delle stesse.
La somma delle nostre skills e competenze ci ha portati a sfidarci con un progetto a dir poco entusiasmante: la stampa e l’ottimizzazione topologica di un braccio robotico. Dall’anima del progetto open source abbiamo sviluppato, tramite le nostre tecnologie di modellazione cad avanzate, una versione dello stesso ottimizzata topologicamente. Simulando il braccio robotico a 6 assi con analisi dinamiche e statiche siamo stati in grado di ricavare un modello che fosse meccanicamente equiparabile a quello di partenza, ma con una riduzione radicale del peso (circa il 50% in meno) e in grado di movimentare carichi maggiori a parità di consumo di energia.
I risultati
Realizzando con tecnologia additiva queste geometrie ottimizzate, abbiamo reso possibile la produzione di componenti difficilmente realizzabili con tecnologie tradizionali. Abbiamo inoltre ottenuto una riduzione drastica dei costi e dei tempi di produzione.